|
| void | Instantiate (const PointToPlaneInitializer &init) override |
| |
| void | Update (Eigen::VectorXdRefConst q, Eigen::VectorXdRef phi) override |
| |
| void | Update (Eigen::VectorXdRefConst q, Eigen::VectorXdRef phi, Eigen::MatrixXdRef jacobian) override |
| |
| void | Update (Eigen::VectorXdRefConst q, Eigen::VectorXdRef phi, Eigen::MatrixXdRef jacobian, HessianRef hessian) override |
| |
| int | TaskSpaceDim () override |
| |
| virtual void | InstantiateBase (const Initializer &init) |
| |
| virtual void | AssignScene (ScenePtr scene) |
| |
| virtual void | Update (Eigen::VectorXdRefConst x, Eigen::VectorXdRefConst u, Eigen::VectorXdRef phi) |
| |
| virtual void | Update (Eigen::VectorXdRefConst x, Eigen::VectorXdRefConst u, Eigen::VectorXdRef phi, Eigen::MatrixXdRef dphi_dx, Eigen::MatrixXdRef dphi_du) |
| |
| virtual void | Update (Eigen::VectorXdRefConst x, Eigen::VectorXdRefConst u, Eigen::VectorXdRef phi, Eigen::MatrixXdRef dphi_dx, Eigen::MatrixXdRef dphi_du, HessianRef ddphi_ddx, HessianRef ddphi_ddu, HessianRef ddphi_dxdu) |
| |
| virtual int | TaskSpaceJacobianDim () |
| |
| virtual void | PreUpdate () |
| |
| virtual std::vector< TaskVectorEntry > | GetLieGroupIndices () |
| |
| std::vector< KinematicFrameRequest > | GetFrames () const |
| |
| | Object () |
| |
| virtual | ~Object () |
| |
| virtual std::string | type () const |
| | Type Information wrapper: must be virtual so that it is polymorphic... More...
|
| |
| std::string | GetObjectName () |
| |
| void | InstantiateObject (const Initializer &init) |
| |
| virtual std::string | Print (const std::string &prepend) const |
| |
| | InstantiableBase ()=default |
| |
| virtual | ~InstantiableBase ()=default |
| |
| virtual std::vector< Initializer > | GetAllTemplates () const =0 |
| |
| void | InstantiateInternal (const Initializer &init) override |
| |
| Initializer | GetInitializerTemplate () override |
| |
| std::vector< Initializer > | GetAllTemplates () const override |
| |
| const PointToPlaneInitializer & | GetParameters () const |
| |
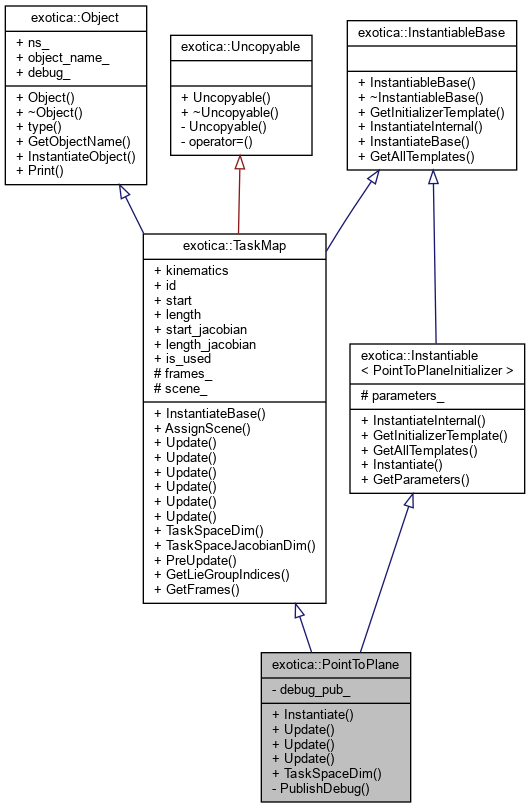
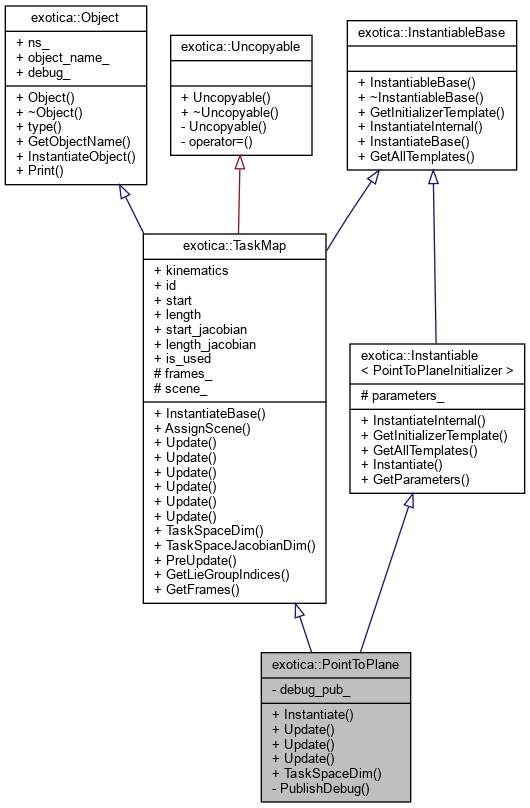
PointToPlane TaskMap: Penalises the z-distance between two frames - or the distance of a point (represented by the Link frame) spanned by the normal represented through the z-axis of a second frame (represented by the Base frame).
This TaskMap returns the signed distance to the plane by default. In an unconstrained optimisation this would correspond to an equality constraint and force the distance to the plane to be minimised. In order to use the TaskMap as an inequality constraint, the parameter 'PositiveOnly' can be set to true. In this case, the TaskMap applies a ReLU-like activation ($x = \max(0, x)$) to the output.
 Public Member Functions inherited from exotica::TaskMap
Public Member Functions inherited from exotica::TaskMap