#include <task_map.h>

Public Attributes | |
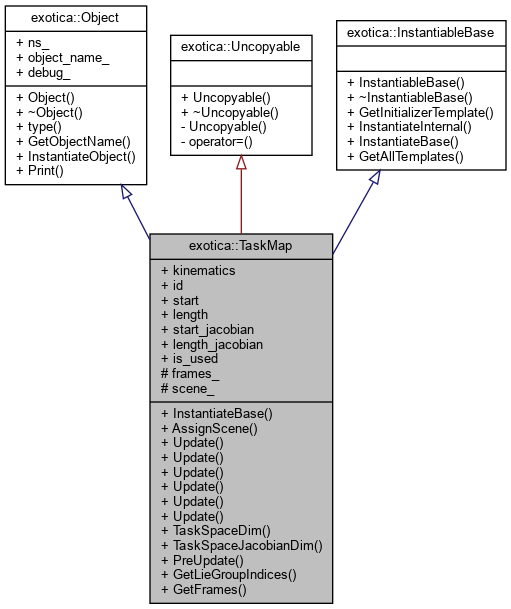
| std::vector< KinematicSolution > | kinematics = std::vector<KinematicSolution>(1) |
| int | id = -1 |
| int | start = -1 |
| int | length = -1 |
| int | start_jacobian = -1 |
| int | length_jacobian = -1 |
| bool | is_used = false |
 Public Attributes inherited from exotica::Object Public Attributes inherited from exotica::Object | |
| std::string | ns_ |
| std::string | object_name_ |
| bool | debug_ |
Protected Attributes | |
| std::vector< KinematicFrameRequest > | frames_ |
| ScenePtr | scene_ = nullptr |
Additional Inherited Members | |
| Private Member Functions inherited from exotica::Uncopyable | |
| Uncopyable ()=default | |
| ~Uncopyable ()=default | |
Member Function Documentation
◆ AssignScene()
|
virtual |
Reimplemented in exotica::JointJerkBackwardDifference, exotica::JointAccelerationBackwardDifference, exotica::JointVelocityBackwardDifference, exotica::InteractionMesh, exotica::QuasiStatic, exotica::EffAxisAlignment, exotica::JointVelocityLimit, exotica::JointVelocityLimitConstraint, exotica::CollisionDistance, exotica::JointLimit, exotica::SmoothCollisionDistance, exotica::SumOfPenetrations, exotica::VariableSizeCollisionDistance, exotica::CenterOfMass, exotica::CollisionCheck, exotica::ContinuousJointPose, exotica::ControlRegularization, exotica::JointPose, and exotica::DistanceToLine2D.
◆ GetFrames()
| std::vector<KinematicFrameRequest> exotica::TaskMap::GetFrames | ( | ) | const |
◆ GetLieGroupIndices()
|
inlinevirtual |
Reimplemented in exotica::EffFrame, and exotica::EffOrientation.
◆ InstantiateBase()
|
virtual |
Reimplemented from exotica::InstantiableBase.
◆ PreUpdate()
|
inlinevirtual |
◆ TaskSpaceDim()
|
pure virtual |
Implemented in exotica::AvoidLookAtSphere, exotica::JointJerkBackwardDifference, exotica::Manipulability, exotica::JointAccelerationBackwardDifference, exotica::LookAt, exotica::JointVelocityBackwardDifference, exotica::GazeAtConstraint, exotica::JointLimit, exotica::JointVelocityLimitConstraint, exotica::PointToPlane, exotica::InteractionMesh, exotica::ControlRegularization, exotica::EffAxisAlignment, exotica::JointVelocityLimit, exotica::QuasiStatic, exotica::EffBox, exotica::PointToLine, exotica::SmoothCollisionDistance, exotica::CollisionDistance, exotica::VariableSizeCollisionDistance, exotica::CenterOfMass, exotica::EffFrame, exotica::EffOrientation, exotica::SphereCollision, exotica::SumOfPenetrations, exotica::ContinuousJointPose, exotica::EffVelocity, exotica::JointPose, exotica::JointTorqueMinimizationProxy, exotica::CollisionCheck, exotica::Distance, exotica::EffPosition, exotica::EffPositionXY, and exotica::DistanceToLine2D.
◆ TaskSpaceJacobianDim()
|
inlinevirtual |
Reimplemented in exotica::EffFrame, and exotica::EffOrientation.
◆ Update() [1/6]
|
pure virtual |
Implemented in exotica::AvoidLookAtSphere, exotica::Manipulability, exotica::JointJerkBackwardDifference, exotica::JointAccelerationBackwardDifference, exotica::LookAt, exotica::JointVelocityBackwardDifference, exotica::GazeAtConstraint, exotica::JointVelocityLimitConstraint, exotica::InteractionMesh, exotica::QuasiStatic, exotica::EffBox, exotica::JointVelocityLimit, exotica::PointToLine, exotica::CollisionDistance, exotica::SmoothCollisionDistance, exotica::SumOfPenetrations, exotica::VariableSizeCollisionDistance, exotica::CenterOfMass, exotica::SphereCollision, exotica::EffVelocity, exotica::CollisionCheck, exotica::ContinuousJointPose, exotica::EffFrame, exotica::EffOrientation, exotica::JointTorqueMinimizationProxy, exotica::EffPosition, exotica::EffPositionXY, exotica::PointToPlane, exotica::EffAxisAlignment, exotica::JointLimit, exotica::ControlRegularization, exotica::JointPose, exotica::Distance, and exotica::DistanceToLine2D.
◆ Update() [2/6]
|
virtual |
Reimplemented in exotica::AvoidLookAtSphere, exotica::JointJerkBackwardDifference, exotica::JointAccelerationBackwardDifference, exotica::LookAt, exotica::JointVelocityBackwardDifference, exotica::GazeAtConstraint, exotica::JointVelocityLimitConstraint, exotica::InteractionMesh, exotica::QuasiStatic, exotica::EffBox, exotica::JointVelocityLimit, exotica::PointToLine, exotica::CenterOfMass, exotica::SphereCollision, exotica::EffVelocity, exotica::ContinuousJointPose, exotica::EffFrame, exotica::EffOrientation, exotica::EffPosition, exotica::EffPositionXY, exotica::CollisionDistance, exotica::SmoothCollisionDistance, exotica::VariableSizeCollisionDistance, exotica::PointToPlane, exotica::EffAxisAlignment, exotica::JointLimit, exotica::ControlRegularization, exotica::JointPose, exotica::Distance, and exotica::DistanceToLine2D.
◆ Update() [3/6]
|
virtual |
◆ Update() [4/6]
|
virtual |
Reimplemented in exotica::JointLimit, and exotica::ControlRegularization.
◆ Update() [5/6]
|
virtual |
Reimplemented in exotica::JointLimit, and exotica::ControlRegularization.
◆ Update() [6/6]
|
virtual |
Reimplemented in exotica::JointLimit, and exotica::ControlRegularization.
Member Data Documentation
◆ frames_
|
protected |
◆ id
| int exotica::TaskMap::id = -1 |
◆ is_used
| bool exotica::TaskMap::is_used = false |
◆ kinematics
| std::vector<KinematicSolution> exotica::TaskMap::kinematics = std::vector<KinematicSolution>(1) |
◆ length
| int exotica::TaskMap::length = -1 |
◆ length_jacobian
| int exotica::TaskMap::length_jacobian = -1 |
◆ scene_
|
protected |
◆ start
| int exotica::TaskMap::start = -1 |
◆ start_jacobian
| int exotica::TaskMap::start_jacobian = -1 |
The documentation for this class was generated from the following file:
- /tmp/exotica/exotica_core/include/exotica_core/task_map.h
