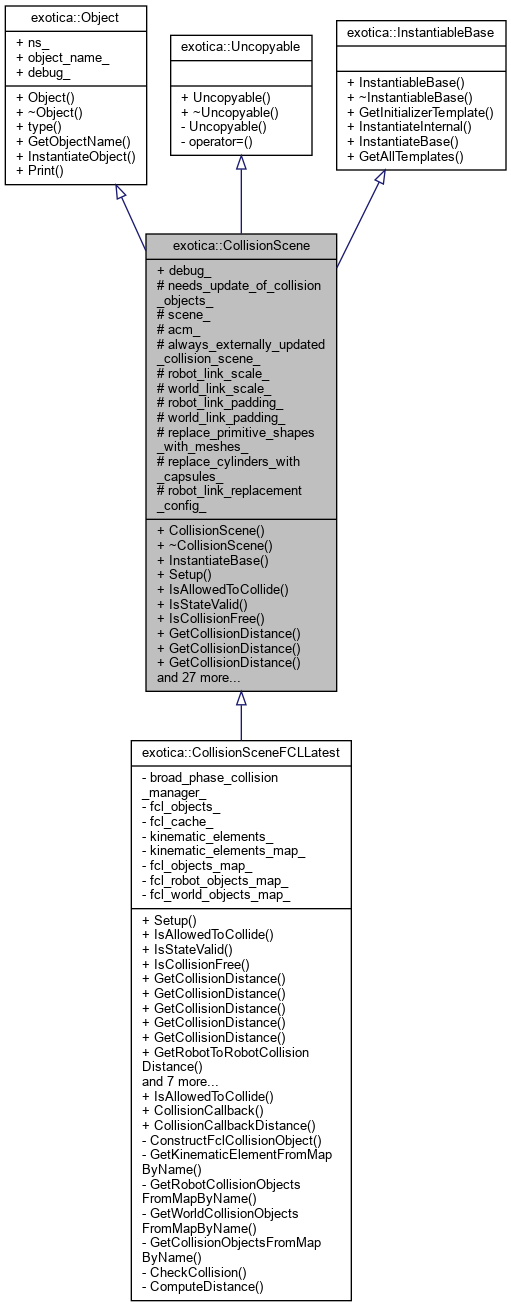
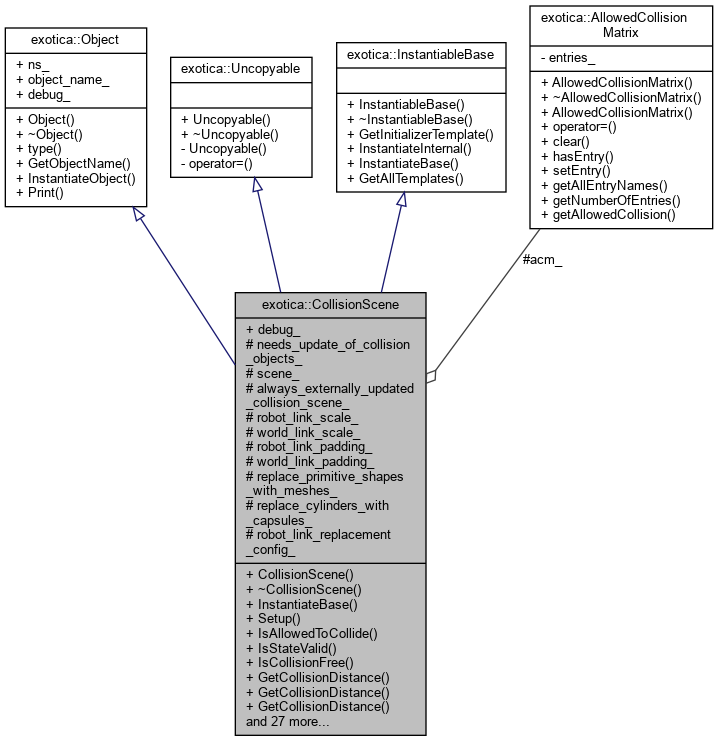
The class of collision scene. More...
#include <collision_scene.h>
Public Member Functions | |
| CollisionScene () | |
| virtual | ~CollisionScene () |
| virtual void | InstantiateBase (const Initializer &init) |
| Instantiates the base properties of the CollisionScene. More... | |
| virtual void | Setup () |
| Setup additional construction that requires initialiser parameter. More... | |
| virtual bool | IsAllowedToCollide (const std::string &o1, const std::string &o2, const bool &self) |
| Returns whether two collision objects/shapes are allowed to collide by name. More... | |
| virtual bool | IsStateValid (bool self=true, double safe_distance=0.0)=0 |
| Checks if the whole robot is valid (collision only). More... | |
| virtual bool | IsCollisionFree (const std::string &o1, const std::string &o2, double safe_distance=0.0) |
| Checks if two objects are in collision. More... | |
| virtual std::vector< CollisionProxy > | GetCollisionDistance (bool self) |
| Computes collision distances. More... | |
| virtual std::vector< CollisionProxy > | GetCollisionDistance (const std::string &o1, const std::string &o2) |
| Computes collision distances between two objects. More... | |
| virtual std::vector< CollisionProxy > | GetCollisionDistance (const std::string &o1, const bool &self) |
| Gets the closest distance of any collision object which is allowed to collide with any collision object related to object o1. More... | |
| virtual std::vector< CollisionProxy > | GetCollisionDistance (const std::string &o1, const bool &self, const bool &disable_collision_scene_update) |
| Gets the closest distance of any collision object which is allowed to collide with any collision object related to object o1. More... | |
| virtual std::vector< CollisionProxy > | GetCollisionDistance (const std::vector< std::string > &objects, const bool &self) |
| Gets the closest distance of any collision object which is allowed to collide with any collision object related to any of the objects. More... | |
| virtual std::vector< CollisionProxy > | GetRobotToRobotCollisionDistance (double check_margin) |
| Gets the closest distances between links within the robot that are closer than check_margin. More... | |
| virtual std::vector< CollisionProxy > | GetRobotToWorldCollisionDistance (double check_margin) |
| Gets the closest distances between links of the robot and the environment that are closer than check_margin. More... | |
| virtual std::vector< std::string > | GetCollisionWorldLinks ()=0 |
| Gets the collision world links. More... | |
| virtual std::vector< std::string > | GetCollisionRobotLinks ()=0 |
| Gets the collision robot links. More... | |
| virtual ContinuousCollisionProxy | ContinuousCollisionCheck (const std::string &o1, const KDL::Frame &tf1_beg, const KDL::Frame &tf1_end, const std::string &o2, const KDL::Frame &tf2_beg, const KDL::Frame &tf2_end) |
| Performs a continuous collision check between two objects with a linear interpolation between two given. More... | |
| virtual std::vector< ContinuousCollisionProxy > | ContinuousCollisionCast (const std::vector< std::vector< std::tuple< std::string, Eigen::Isometry3d, Eigen::Isometry3d >>> &motion_transforms) |
| Performs a continuous collision check by casting the active objects passed in against the static environment. More... | |
| virtual Eigen::Vector3d | GetTranslation (const std::string &name)=0 |
| Returns the translation of the named collision object. More... | |
| void | SetACM (const AllowedCollisionMatrix &acm) |
| bool | GetAlwaysExternallyUpdatedCollisionScene () const |
| void | SetAlwaysExternallyUpdatedCollisionScene (const bool value) |
| double | GetRobotLinkScale () const |
| void | SetRobotLinkScale (const double scale) |
| double | GetWorldLinkScale () const |
| void | SetWorldLinkScale (const double scale) |
| double | GetRobotLinkPadding () const |
| void | SetRobotLinkPadding (const double padding) |
| double | GetWorldLinkPadding () const |
| void | SetWorldLinkPadding (const double padding) |
| bool | GetReplacePrimitiveShapesWithMeshes () const |
| void | SetReplacePrimitiveShapesWithMeshes (const bool value) |
| virtual void | UpdateCollisionObjects (const std::map< std::string, std::weak_ptr< KinematicElement >> &objects)=0 |
| Creates the collision scene from kinematic elements. More... | |
| virtual void | UpdateCollisionObjectTransforms ()=0 |
| Updates collision object transformations from the kinematic tree. More... | |
| bool | get_replace_cylinders_with_capsules () const |
| void | set_replace_cylinders_with_capsules (const bool value) |
| void | AssignScene (std::shared_ptr< Scene > scene) |
| Sets a scene pointer to the CollisionScene for access to methods. More... | |
 Public Member Functions inherited from exotica::Object Public Member Functions inherited from exotica::Object | |
| Object () | |
| virtual | ~Object () |
| virtual std::string | type () const |
| Type Information wrapper: must be virtual so that it is polymorphic... More... | |
| std::string | GetObjectName () |
| void | InstantiateObject (const Initializer &init) |
| virtual std::string | Print (const std::string &prepend) const |
| Public Member Functions inherited from exotica::Uncopyable | |
| Uncopyable ()=default | |
| ~Uncopyable ()=default | |
| Public Member Functions inherited from exotica::InstantiableBase | |
| InstantiableBase ()=default | |
| virtual | ~InstantiableBase ()=default |
| virtual Initializer | GetInitializerTemplate ()=0 |
| virtual void | InstantiateInternal (const Initializer &init)=0 |
| virtual std::vector< Initializer > | GetAllTemplates () const =0 |
Public Attributes | |
| bool | debug_ = false |
| Public Attributes inherited from exotica::Object | |
| std::string | ns_ |
| std::string | object_name_ |
| bool | debug_ |
Protected Attributes | |
| bool | needs_update_of_collision_objects_ = true |
| Indicates whether TriggerUpdateCollisionObjects needs to be called. More... | |
| std::weak_ptr< Scene > | scene_ |
| Stores a pointer to the Scene which owns this CollisionScene. More... | |
| AllowedCollisionMatrix | acm_ |
| The allowed collision matrix. More... | |
| bool | always_externally_updated_collision_scene_ = false |
| Whether the collision scene is automatically updated - if not, update on queries. More... | |
| double | robot_link_scale_ = 1.0 |
| Robot link scaling. More... | |
| double | world_link_scale_ = 1.0 |
| World link scaling. More... | |
| double | robot_link_padding_ = 0.0 |
| Robot link padding. More... | |
| double | world_link_padding_ = 0.0 |
| World link padding. More... | |
| bool | replace_primitive_shapes_with_meshes_ = false |
| Replace primitive shapes with meshes internally (e.g. when primitive shape algorithms are brittle, i.e. in FCL) More... | |
| bool | replace_cylinders_with_capsules_ = false |
| Replace cylinders with capsules internally. More... | |
| std::string | robot_link_replacement_config_ = "" |
| Filename for config file (YAML) which contains shape replacements. More... | |
Detailed Description
The class of collision scene.
Constructor & Destructor Documentation
◆ CollisionScene()
|
inline |
◆ ~CollisionScene()
|
inlinevirtual |
Member Function Documentation
◆ AssignScene()
|
inline |
Sets a scene pointer to the CollisionScene for access to methods.
◆ ContinuousCollisionCast()
|
inlinevirtual |
Performs a continuous collision check by casting the active objects passed in against the static environment.
- Parameters
-
[in] motion_transforms A tuple consisting out of collision object name and its beginning and final transform.
- Returns
- Vector of deepest ContinuousCollisionProxy (one per dimension).
◆ ContinuousCollisionCheck()
|
inlinevirtual |
Performs a continuous collision check between two objects with a linear interpolation between two given.
- Parameters
-
[in] o1 The first collision object, by name. [in] tf1_beg The beginning transform for o1. [in] tf1_end The end transform for o1. [in] o2 The second collision object, by name. [in] tf2_beg The beginning transform for o2. [in] tf2_end The end transform for o2.
- Returns
- ContinuousCollisionProxy.
Reimplemented in exotica::CollisionSceneFCLLatest.
◆ get_replace_cylinders_with_capsules()
|
inline |
◆ GetAlwaysExternallyUpdatedCollisionScene()
|
inline |
◆ GetCollisionDistance() [1/5]
|
inlinevirtual |
Computes collision distances.
- Parameters
-
self Indicate if self collision check is required.
- Returns
- Collision proximity objects for all colliding pairs of shapes.
Reimplemented in exotica::CollisionSceneFCLLatest.
◆ GetCollisionDistance() [2/5]
|
inlinevirtual |
Gets the closest distance of any collision object which is allowed to collide with any collision object related to object o1.
- Parameters
-
[in] o1 Name of object 1.
- Returns
- Vector of proximity objects.
Reimplemented in exotica::CollisionSceneFCLLatest.
◆ GetCollisionDistance() [3/5]
|
inlinevirtual |
Gets the closest distance of any collision object which is allowed to collide with any collision object related to object o1.
- Parameters
-
[in] o1 Name of object 1. [in] disable_collision_scene_update Allows disabling of collision object transforms (requires manual update).
- Returns
- Vector of proximity objects.
Reimplemented in exotica::CollisionSceneFCLLatest.
◆ GetCollisionDistance() [4/5]
|
inlinevirtual |
Computes collision distances between two objects.
- Parameters
-
o1 Name of object 1. o2 Name of object 2.
- Returns
- Vector of proximity objects.
Reimplemented in exotica::CollisionSceneFCLLatest.
◆ GetCollisionDistance() [5/5]
|
inlinevirtual |
Gets the closest distance of any collision object which is allowed to collide with any collision object related to any of the objects.
- Parameters
-
[in] objects Vector of object names.
- Returns
- Vector of proximity objects.
Reimplemented in exotica::CollisionSceneFCLLatest.
◆ GetCollisionRobotLinks()
|
pure virtual |
Gets the collision robot links.
- Returns
- The collision robot links.
Implemented in exotica::CollisionSceneFCLLatest.
◆ GetCollisionWorldLinks()
|
pure virtual |
Gets the collision world links.
- Returns
- The collision world links.
Implemented in exotica::CollisionSceneFCLLatest.
◆ GetReplacePrimitiveShapesWithMeshes()
|
inline |
◆ GetRobotLinkPadding()
|
inline |
◆ GetRobotLinkScale()
|
inline |
◆ GetRobotToRobotCollisionDistance()
|
inlinevirtual |
Gets the closest distances between links within the robot that are closer than check_margin.
- Parameters
-
[in] check_margin Margin for distance checks - only objects closer than this margin will be checked
Reimplemented in exotica::CollisionSceneFCLLatest.
◆ GetRobotToWorldCollisionDistance()
|
inlinevirtual |
Gets the closest distances between links of the robot and the environment that are closer than check_margin.
- Parameters
-
[in] check_margin Margin for distance checks - only objects closer than this margin will be checked
Reimplemented in exotica::CollisionSceneFCLLatest.
◆ GetTranslation()
|
pure virtual |
Returns the translation of the named collision object.
- Parameters
-
[in] name Name of the collision object to query.
Implemented in exotica::CollisionSceneFCLLatest.
◆ GetWorldLinkPadding()
|
inline |
◆ GetWorldLinkScale()
|
inline |
◆ InstantiateBase()
|
virtual |
Instantiates the base properties of the CollisionScene.
Reimplemented from exotica::InstantiableBase.
◆ IsAllowedToCollide()
|
virtual |
Returns whether two collision objects/shapes are allowed to collide by name.
- Parameters
-
o1 Name of the frame of the collision object (e.g., base_link_collision_0) o2 Name of the frame of the other collision object (e.g., base_link_collision_0)
- Returns
- true The two objects are allowed to collide.
- false The two objects are excluded, e.g., by an ACM.
Reimplemented in exotica::CollisionSceneFCLLatest.
◆ IsCollisionFree()
|
inlinevirtual |
Checks if two objects are in collision.
- Parameters
-
o1 Name of object 1. o2 Name of object 2.
- Returns
- True is the two objects are not colliding.
Reimplemented in exotica::CollisionSceneFCLLatest.
◆ IsStateValid()
|
pure virtual |
Checks if the whole robot is valid (collision only).
- Parameters
-
self Indicate if self collision check is required.
- Returns
- True, if the state is collision free..
Implemented in exotica::CollisionSceneFCLLatest.
◆ set_replace_cylinders_with_capsules()
|
inline |
◆ SetACM()
|
inline |
◆ SetAlwaysExternallyUpdatedCollisionScene()
|
inline |
◆ SetReplacePrimitiveShapesWithMeshes()
|
inline |
◆ SetRobotLinkPadding()
|
inline |
◆ SetRobotLinkScale()
|
inline |
◆ Setup()
|
inlinevirtual |
Setup additional construction that requires initialiser parameter.
Reimplemented in exotica::CollisionSceneFCLLatest.
◆ SetWorldLinkPadding()
|
inline |
◆ SetWorldLinkScale()
|
inline |
◆ UpdateCollisionObjects()
|
pure virtual |
Creates the collision scene from kinematic elements.
- Parameters
-
objects Vector kinematic element pointers of collision objects.
Implemented in exotica::CollisionSceneFCLLatest.
◆ UpdateCollisionObjectTransforms()
|
pure virtual |
Updates collision object transformations from the kinematic tree.
Implemented in exotica::CollisionSceneFCLLatest.
Member Data Documentation
◆ acm_
|
protected |
The allowed collision matrix.
◆ always_externally_updated_collision_scene_
|
protected |
Whether the collision scene is automatically updated - if not, update on queries.
◆ debug_
| bool exotica::CollisionScene::debug_ = false |
◆ needs_update_of_collision_objects_
|
protected |
Indicates whether TriggerUpdateCollisionObjects needs to be called.
◆ replace_cylinders_with_capsules_
|
protected |
Replace cylinders with capsules internally.
◆ replace_primitive_shapes_with_meshes_
|
protected |
Replace primitive shapes with meshes internally (e.g. when primitive shape algorithms are brittle, i.e. in FCL)
◆ robot_link_padding_
|
protected |
Robot link padding.
◆ robot_link_replacement_config_
|
protected |
Filename for config file (YAML) which contains shape replacements.
◆ robot_link_scale_
|
protected |
Robot link scaling.
◆ scene_
|
protected |
Stores a pointer to the Scene which owns this CollisionScene.
◆ world_link_padding_
|
protected |
World link padding.
◆ world_link_scale_
|
protected |
World link scaling.
The documentation for this class was generated from the following file:
- /tmp/exotica/exotica_core/include/exotica_core/collision_scene.h
