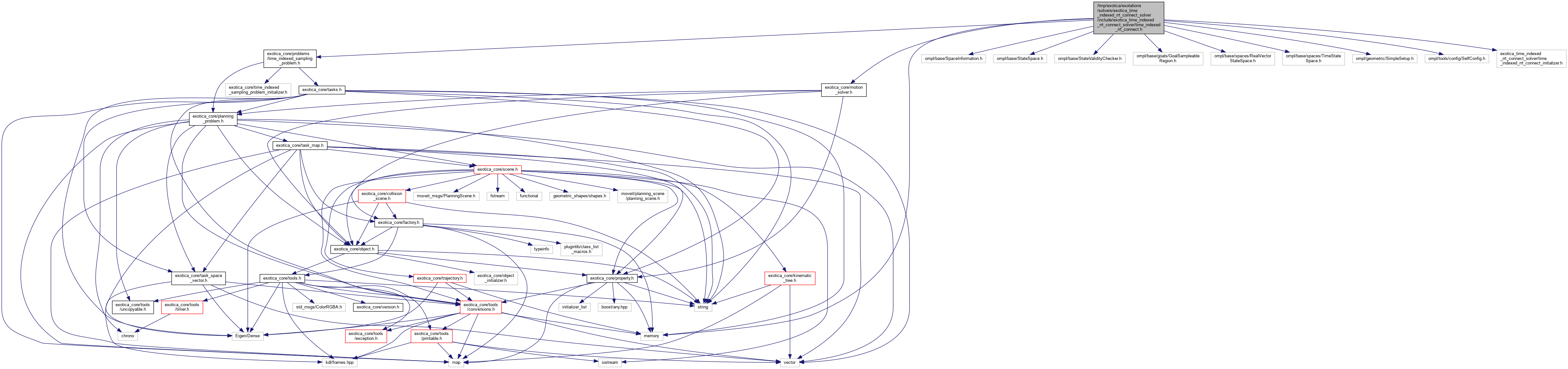
#include <memory>#include <exotica_core/motion_solver.h>#include <exotica_core/problems/time_indexed_sampling_problem.h>#include <ompl/base/SpaceInformation.h>#include <ompl/base/StateSpace.h>#include <ompl/base/StateValidityChecker.h>#include <ompl/base/goals/GoalSampleableRegion.h>#include <ompl/base/spaces/RealVectorStateSpace.h>#include <ompl/base/spaces/TimeStateSpace.h>#include <ompl/geometric/SimpleSetup.h>#include <ompl/tools/config/SelfConfig.h>#include <exotica_time_indexed_rrt_connect_solver/time_indexed_rrt_connect_initializer.h>
Include dependency graph for time_indexed_rrt_connect.h:
Go to the source code of this file.
Classes | |
| class | exotica::OMPLTimeIndexedRNStateSpace |
| class | exotica::OMPLTimeIndexedRNStateSpace::StateType |
| class | exotica::OMPLTimeIndexedStateValidityChecker |
| class | exotica::TimeIndexedRRTConnectSolver |
| class | exotica::OMPLTimeIndexedRRTConnect |
| class | exotica::OMPLTimeIndexedRRTConnect::Motion |
| Representation of a motion. More... | |
| struct | exotica::OMPLTimeIndexedRRTConnect::TreeGrowingInfo |
| Information attached to growing a tree of motions (used internally) More... | |
Namespaces | |
| exotica | |
Typedefs | |
| typedef boost::function< ompl::base::PlannerPtr(const ompl::base::SpaceInformationPtr &si, const std::string &name)> | exotica::ConfiguredPlannerAllocator |
