#include <exotica_core/motion_solver.h>#include <exotica_core/problems/dynamic_time_indexed_shooting_problem.h>#include <exotica_ompl_control_solver/ompl_control_solver_initializer.h>#include <ompl/base/goals/GoalState.h>#include <ompl/base/spaces/SE2StateSpace.h>#include <ompl/control/SimpleSetup.h>#include <ompl/control/SpaceInformation.h>#include <ompl/control/spaces/RealVectorControlSpace.h>
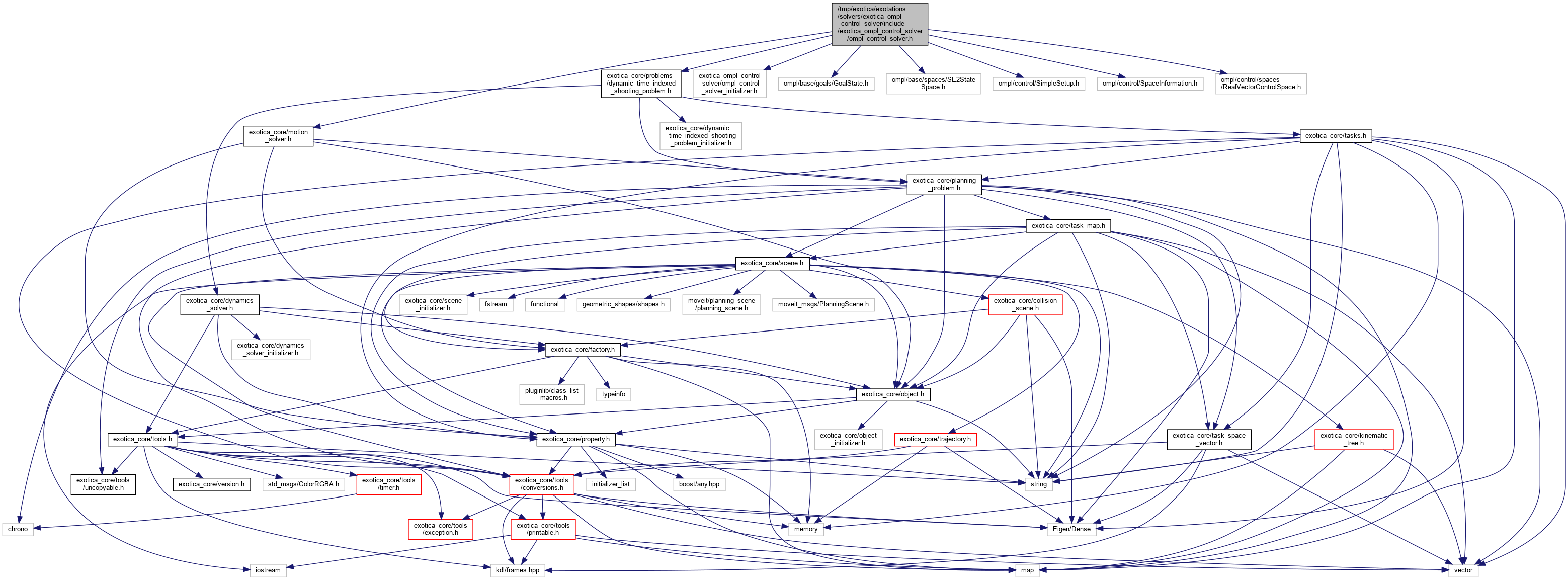
Include dependency graph for ompl_control_solver.h:
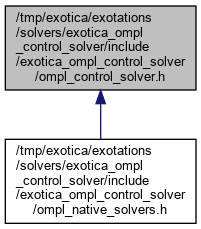
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | exotica::OMPLStatePropagator |
| class | exotica::OMPLControlSolver |
Namespaces | |
| exotica | |
Typedefs | |
| typedef std::function< ob::PlannerPtr(const oc::SpaceInformationPtr &si)> | ConfiguredPlannerAllocator |
Typedef Documentation
◆ ConfiguredPlannerAllocator
| typedef std::function<ob::PlannerPtr(const oc::SpaceInformationPtr &si)> ConfiguredPlannerAllocator |
