#include <ompl_control_solver.h>
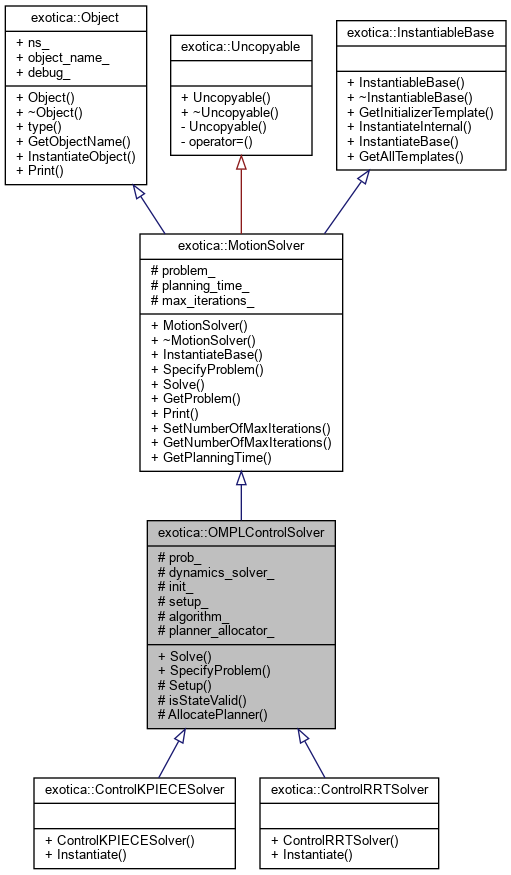
Inheritance diagram for exotica::OMPLControlSolver:
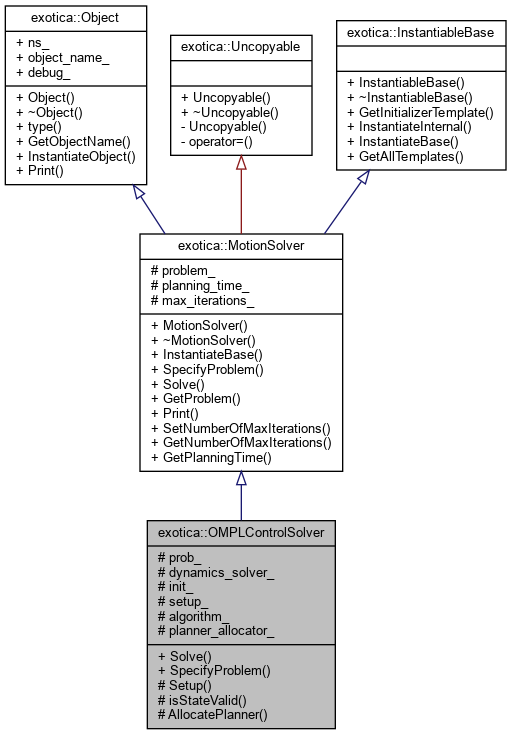
Collaboration diagram for exotica::OMPLControlSolver:
Public Member Functions | |
| void | Solve (Eigen::MatrixXd &solution) override |
| Solves the problem. More... | |
| void | SpecifyProblem (PlanningProblemPtr pointer) override |
| Binds the solver to a specific problem which must be pre-initalised. More... | |
 Public Member Functions inherited from exotica::MotionSolver Public Member Functions inherited from exotica::MotionSolver | |
| MotionSolver ()=default | |
| virtual | ~MotionSolver ()=default |
| void | InstantiateBase (const Initializer &init) override |
| PlanningProblemPtr | GetProblem () const |
| std::string | Print (const std::string &prepend) const override |
| void | SetNumberOfMaxIterations (int max_iter) |
| int | GetNumberOfMaxIterations () |
| double | GetPlanningTime () |
| Public Member Functions inherited from exotica::Object | |
| Object () | |
| virtual | ~Object () |
| virtual std::string | type () const |
| Type Information wrapper: must be virtual so that it is polymorphic... More... | |
| std::string | GetObjectName () |
| void | InstantiateObject (const Initializer &init) |
| Public Member Functions inherited from exotica::InstantiableBase | |
| InstantiableBase ()=default | |
| virtual | ~InstantiableBase ()=default |
| virtual Initializer | GetInitializerTemplate ()=0 |
| virtual void | InstantiateInternal (const Initializer &init)=0 |
| virtual std::vector< Initializer > | GetAllTemplates () const =0 |
Protected Member Functions | |
| void | Setup () |
| bool | isStateValid (const oc::SpaceInformationPtr si, const ob::State *state) |
Static Protected Member Functions | |
| template<typename PlannerType > | |
| static ob::PlannerPtr | AllocatePlanner (const oc::SpaceInformationPtr &si) |
Protected Attributes | |
| DynamicTimeIndexedShootingProblemPtr | prob_ |
| DynamicsSolverPtr | dynamics_solver_ |
| !< Shared pointer to the planning problem. More... | |
| OMPLControlSolverInitializer | init_ |
| !< Shared pointer to the dynamics solver. More... | |
| std::unique_ptr< oc::SimpleSetup > | setup_ |
| std::string | algorithm_ |
| ConfiguredPlannerAllocator | planner_allocator_ |
| Protected Attributes inherited from exotica::MotionSolver | |
| PlanningProblemPtr | problem_ |
| double | planning_time_ = -1 |
| int | max_iterations_ = 100 |
Additional Inherited Members | |
| Public Attributes inherited from exotica::Object | |
| std::string | ns_ |
| std::string | object_name_ |
| bool | debug_ |
Member Function Documentation
◆ AllocatePlanner()
template<typename PlannerType >
|
inlinestaticprotected |
◆ isStateValid()
|
inlineprotected |
◆ Setup()
|
protected |
◆ Solve()
|
overridevirtual |
Solves the problem.
- Parameters
-
solution Returned solution trajectory as a vector of joint configurations.
Implements exotica::MotionSolver.
◆ SpecifyProblem()
|
overridevirtual |
Binds the solver to a specific problem which must be pre-initalised.
- Parameters
-
pointer Shared pointer to the motion planning problem
- Returns
- Successful if the problem is a valid DynamicTimeIndexedProblem
Reimplemented from exotica::MotionSolver.
Member Data Documentation
◆ algorithm_
|
protected |
◆ dynamics_solver_
|
protected |
!< Shared pointer to the planning problem.
◆ init_
|
protected |
!< Shared pointer to the dynamics solver.
◆ planner_allocator_
|
protected |
◆ prob_
|
protected |
◆ setup_
|
protected |
The documentation for this class was generated from the following file:
- /tmp/exotica/exotations/solvers/exotica_ompl_control_solver/include/exotica_ompl_control_solver/ompl_control_solver.h
