#include <motion_solver.h>
◆ MotionSolver()
| exotica::MotionSolver::MotionSolver |
( |
| ) |
|
|
default |
◆ ~MotionSolver()
| virtual exotica::MotionSolver::~MotionSolver |
( |
| ) |
|
|
virtualdefault |
◆ GetNumberOfMaxIterations()
| int exotica::MotionSolver::GetNumberOfMaxIterations |
( |
| ) |
|
|
inline |
◆ GetPlanningTime()
| double exotica::MotionSolver::GetPlanningTime |
( |
| ) |
|
|
inline |
◆ GetProblem()
◆ InstantiateBase()
| void exotica::MotionSolver::InstantiateBase |
( |
const Initializer & |
init | ) |
|
|
overridevirtual |
◆ Print()
| std::string exotica::MotionSolver::Print |
( |
const std::string & |
prepend | ) |
const |
|
overridevirtual |
◆ SetNumberOfMaxIterations()
| void exotica::MotionSolver::SetNumberOfMaxIterations |
( |
int |
max_iter | ) |
|
|
inline |
◆ Solve()
| virtual void exotica::MotionSolver::Solve |
( |
Eigen::MatrixXd & |
solution | ) |
|
|
pure virtual |
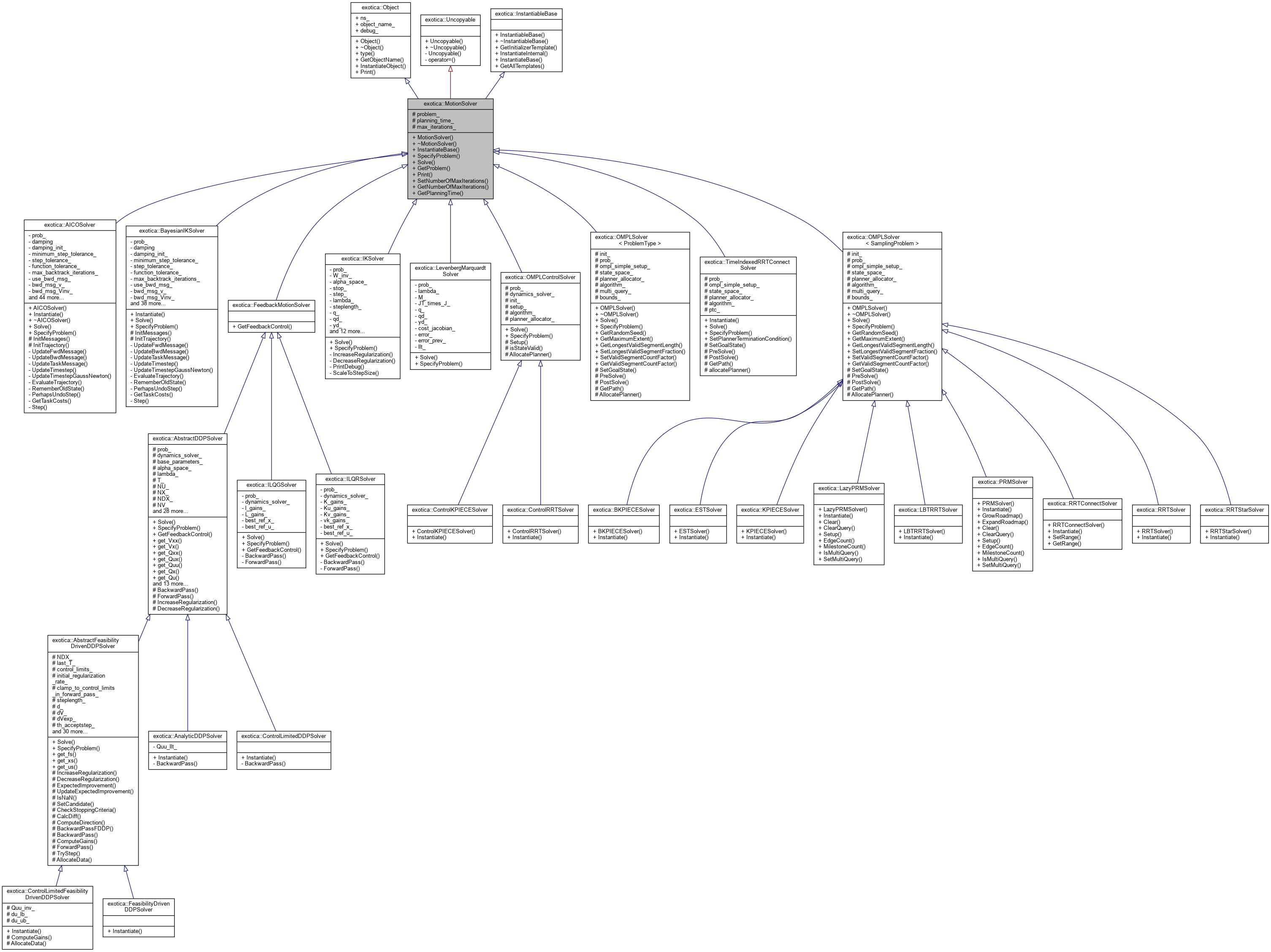
Implemented in exotica::OMPLControlSolver, exotica::TimeIndexedRRTConnectSolver, exotica::AICOSolver, exotica::OMPLSolver< ProblemType >, exotica::OMPLSolver< SamplingProblem >, exotica::BayesianIKSolver, exotica::ILQGSolver, exotica::ILQRSolver, exotica::AbstractDDPSolver, exotica::IKSolver, exotica::AbstractFeasibilityDrivenDDPSolver, and exotica::LevenbergMarquardtSolver.
◆ SpecifyProblem()
Reimplemented in exotica::OMPLControlSolver, exotica::TimeIndexedRRTConnectSolver, exotica::AICOSolver, exotica::OMPLSolver< ProblemType >, exotica::OMPLSolver< SamplingProblem >, exotica::BayesianIKSolver, exotica::ILQGSolver, exotica::ILQRSolver, exotica::AbstractDDPSolver, exotica::IKSolver, exotica::AbstractFeasibilityDrivenDDPSolver, and exotica::LevenbergMarquardtSolver.
◆ max_iterations_
| int exotica::MotionSolver::max_iterations_ = 100 |
|
protected |
◆ planning_time_
| double exotica::MotionSolver::planning_time_ = -1 |
|
protected |
◆ problem_
The documentation for this class was generated from the following file:
 Public Member Functions inherited from exotica::Object
Public Member Functions inherited from exotica::Object