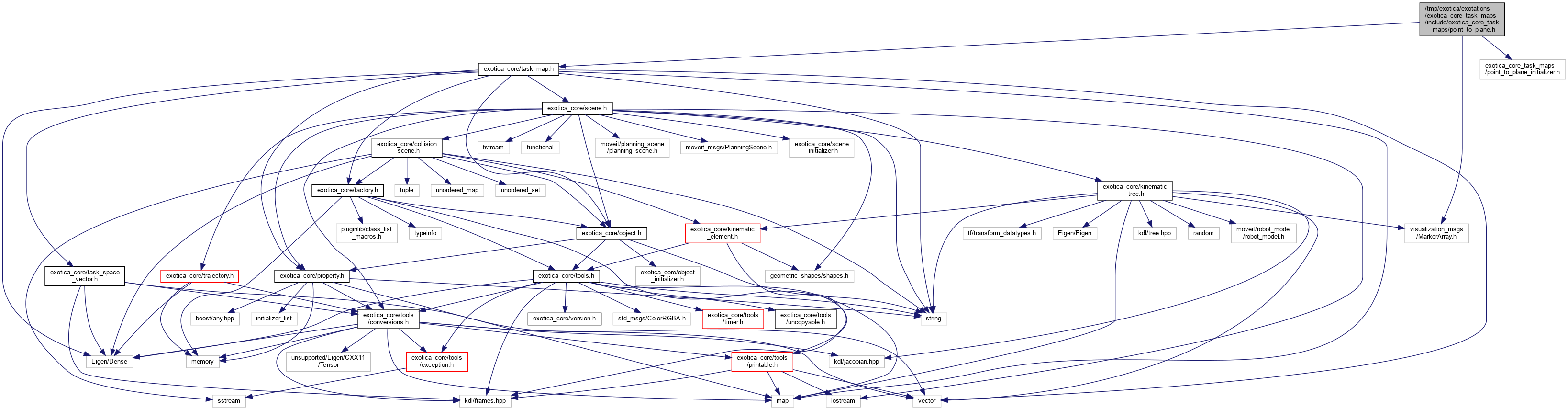
#include <exotica_core/task_map.h>#include <exotica_core_task_maps/point_to_plane_initializer.h>#include <visualization_msgs/MarkerArray.h>
Include dependency graph for point_to_plane.h:
Go to the source code of this file.
Classes | |
| class | exotica::PointToPlane |
| PointToPlane TaskMap: Penalises the z-distance between two frames - or the distance of a point (represented by the Link frame) spanned by the normal represented through the z-axis of a second frame (represented by the Base frame). More... | |
Namespaces | |
| exotica | |
