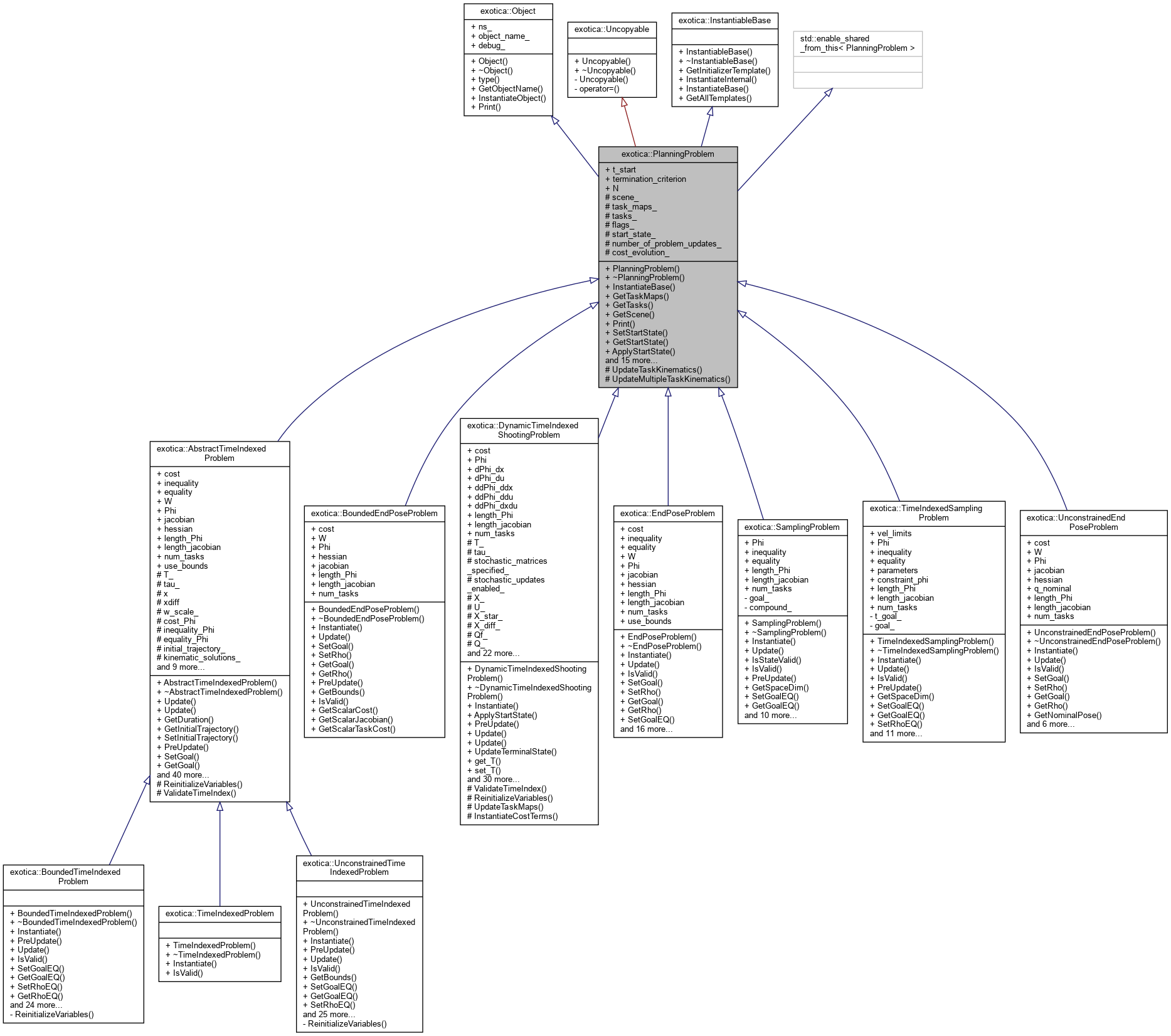
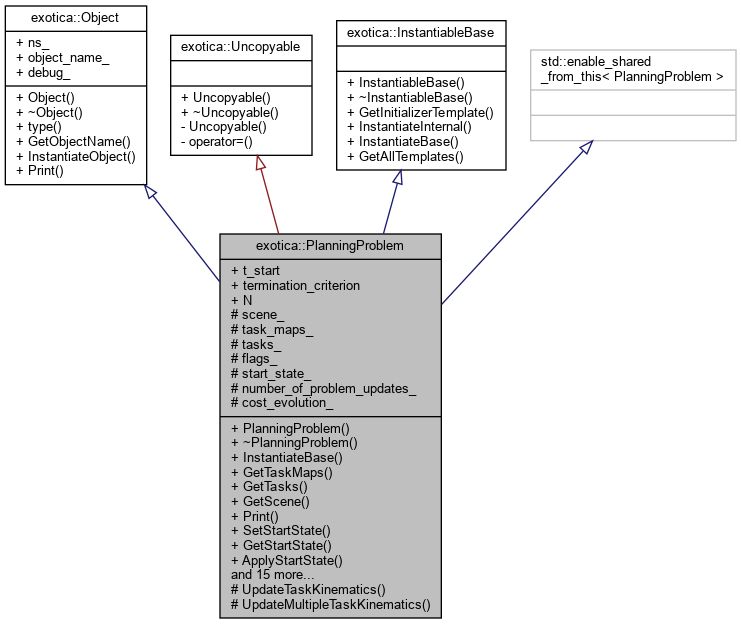
#include <planning_problem.h>
◆ PlanningProblem()
| exotica::PlanningProblem::PlanningProblem |
( |
| ) |
|
◆ ~PlanningProblem()
| virtual exotica::PlanningProblem::~PlanningProblem |
( |
| ) |
|
|
virtual |
◆ ApplyStartState()
| virtual Eigen::VectorXd exotica::PlanningProblem::ApplyStartState |
( |
bool |
update_traj = true | ) |
|
|
virtual |
◆ get_num_controls()
| int exotica::PlanningProblem::get_num_controls |
( |
| ) |
const |
◆ get_num_positions()
| int exotica::PlanningProblem::get_num_positions |
( |
| ) |
const |
! Dimension of planning problem. TODO: Update from positions/velocities/controls and make private.
◆ get_num_velocities()
| int exotica::PlanningProblem::get_num_velocities |
( |
| ) |
const |
◆ GetCostEvolution() [1/2]
| std::pair<std::vector<double>, std::vector<double> > exotica::PlanningProblem::GetCostEvolution |
( |
| ) |
const |
◆ GetCostEvolution() [2/2]
| double exotica::PlanningProblem::GetCostEvolution |
( |
int |
index | ) |
const |
◆ GetFlags()
◆ GetNumberOfIterations()
| int exotica::PlanningProblem::GetNumberOfIterations |
( |
| ) |
const |
◆ GetNumberOfProblemUpdates()
| unsigned int exotica::PlanningProblem::GetNumberOfProblemUpdates |
( |
| ) |
const |
|
inline |
◆ GetScene()
| ScenePtr exotica::PlanningProblem::GetScene |
( |
| ) |
const |
◆ GetStartState()
| Eigen::VectorXd exotica::PlanningProblem::GetStartState |
( |
| ) |
const |
◆ GetStartTime()
| double exotica::PlanningProblem::GetStartTime |
( |
| ) |
const |
◆ GetTaskMaps()
| TaskMapMap& exotica::PlanningProblem::GetTaskMaps |
( |
| ) |
|
◆ GetTasks()
| TaskMapVec& exotica::PlanningProblem::GetTasks |
( |
| ) |
|
◆ InstantiateBase()
| void exotica::PlanningProblem::InstantiateBase |
( |
const Initializer & |
init | ) |
|
|
overridevirtual |
◆ IsValid()
| virtual bool exotica::PlanningProblem::IsValid |
( |
| ) |
|
|
inlinevirtual |
◆ PreUpdate()
| virtual void exotica::PlanningProblem::PreUpdate |
( |
| ) |
|
|
virtual |
◆ Print()
| std::string exotica::PlanningProblem::Print |
( |
const std::string & |
prepend | ) |
const |
|
overridevirtual |
◆ ResetCostEvolution()
| void exotica::PlanningProblem::ResetCostEvolution |
( |
size_t |
size | ) |
|
◆ ResetNumberOfProblemUpdates()
| void exotica::PlanningProblem::ResetNumberOfProblemUpdates |
( |
| ) |
|
|
inline |
◆ SetCostEvolution()
| void exotica::PlanningProblem::SetCostEvolution |
( |
int |
index, |
|
|
double |
value |
|
) |
| |
◆ SetStartState()
◆ SetStartTime()
| void exotica::PlanningProblem::SetStartTime |
( |
double |
t | ) |
|
◆ UpdateMultipleTaskKinematics()
| void exotica::PlanningProblem::UpdateMultipleTaskKinematics |
( |
std::vector< std::shared_ptr< KinematicResponse >> |
responses | ) |
|
|
protected |
◆ UpdateTaskKinematics()
| void exotica::PlanningProblem::UpdateTaskKinematics |
( |
std::shared_ptr< KinematicResponse > |
response | ) |
|
|
protected |
◆ cost_evolution_
| std::vector<std::pair<std::chrono::high_resolution_clock::time_point, double> > exotica::PlanningProblem::cost_evolution_ |
|
protected |
◆ flags_
| int exotica::PlanningProblem::N = 0 |
◆ number_of_problem_updates_
| unsigned int exotica::PlanningProblem::number_of_problem_updates_ = 0 |
|
protected |
◆ scene_
| ScenePtr exotica::PlanningProblem::scene_ |
|
protected |
◆ start_state_
| Eigen::VectorXd exotica::PlanningProblem::start_state_ |
|
protected |
◆ t_start
| double exotica::PlanningProblem::t_start |
◆ task_maps_
◆ tasks_
◆ termination_criterion
The documentation for this class was generated from the following file:
 Public Member Functions inherited from exotica::Object
Public Member Functions inherited from exotica::Object