#include <exotica_core/dynamics_solver.h>#include <exotica_core/planning_problem.h>#include <exotica_core/tasks.h>#include <exotica_core/dynamic_time_indexed_shooting_problem_initializer.h>
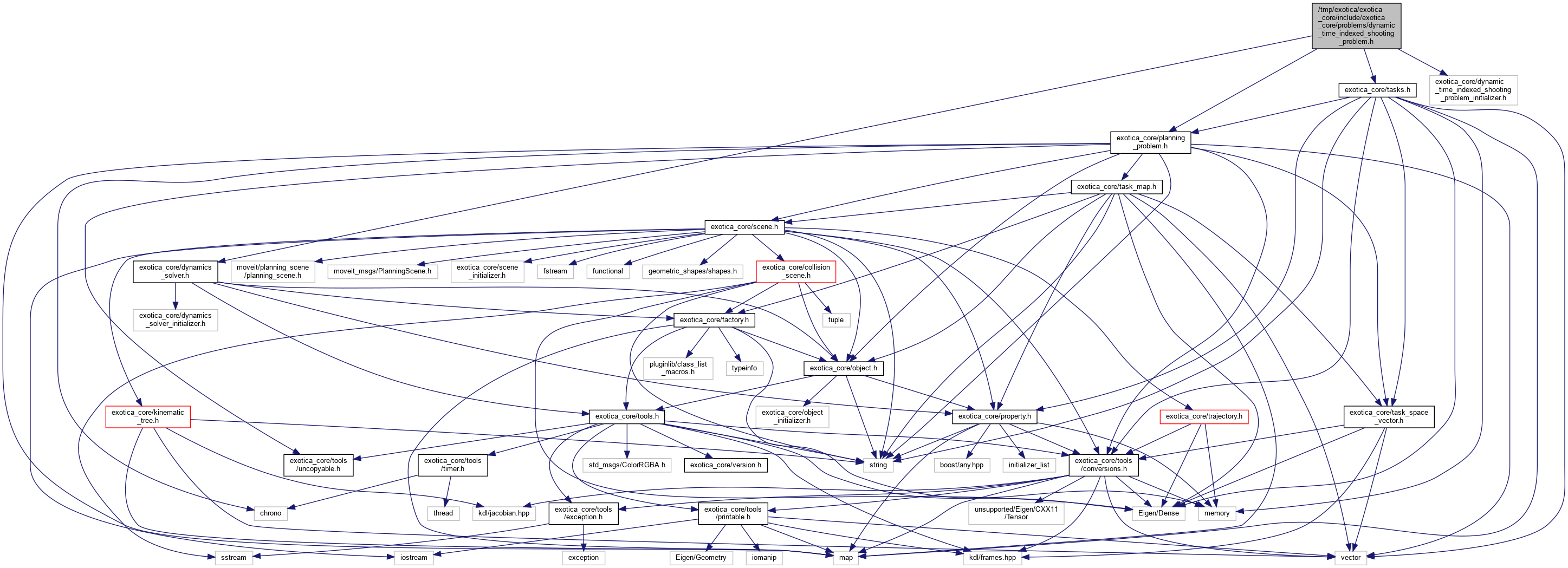
Include dependency graph for dynamic_time_indexed_shooting_problem.h:
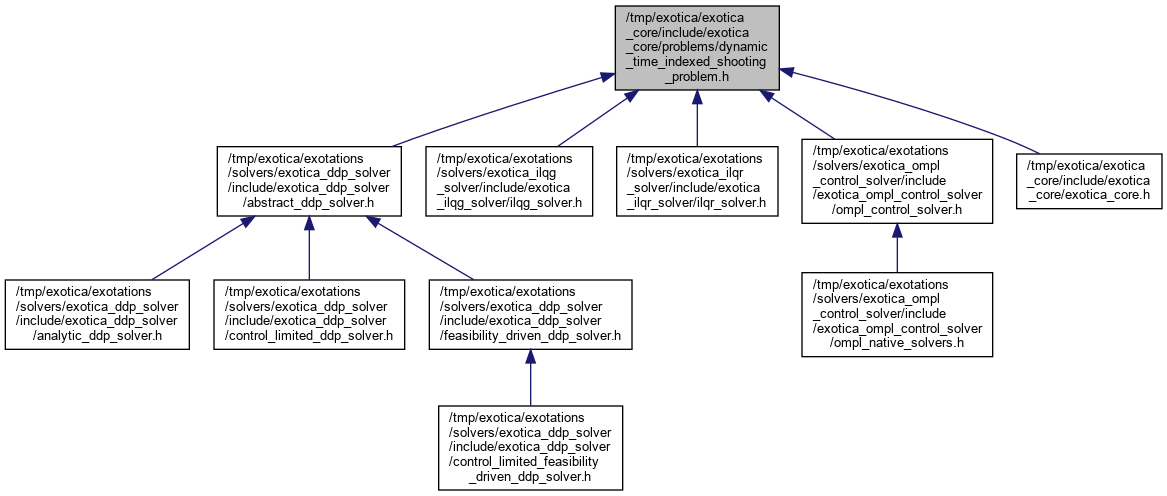
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | exotica::DynamicTimeIndexedShootingProblem |
Namespaces | |
| exotica | |
Typedefs | |
| typedef std::shared_ptr< exotica::DynamicTimeIndexedShootingProblem > | exotica::DynamicTimeIndexedShootingProblemPtr |
Enumerations | |
| enum | exotica::ControlCostLossTermType { exotica::Undefined = -1, exotica::L2 = 0, exotica::SmoothL1 = 1, exotica::Huber = 2, exotica::PseudoHuber = 3 } |
