#include <joint_pose.h>
Inheritance diagram for exotica::JointPose:

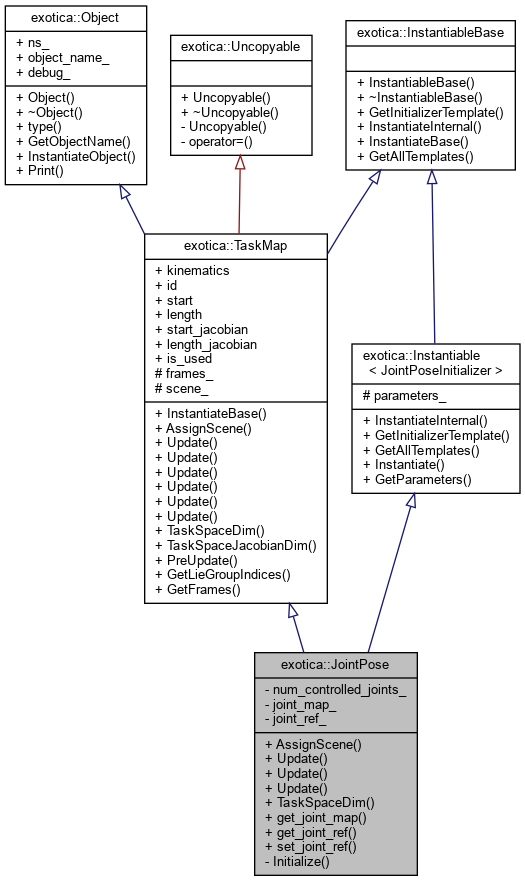
Collaboration diagram for exotica::JointPose:
Public Member Functions | |
| void | AssignScene (ScenePtr scene) override |
| void | Update (Eigen::VectorXdRefConst q, Eigen::VectorXdRef phi) override |
| void | Update (Eigen::VectorXdRefConst q, Eigen::VectorXdRef phi, Eigen::MatrixXdRef jacobian) override |
| void | Update (Eigen::VectorXdRefConst q, Eigen::VectorXdRef phi, Eigen::MatrixXdRef jacobian, HessianRef hessian) override |
| int | TaskSpaceDim () override |
| const std::vector< int > & | get_joint_map () const |
| const Eigen::VectorXd & | get_joint_ref () const |
| void | set_joint_ref (Eigen::VectorXdRefConst ref) |
 Public Member Functions inherited from exotica::TaskMap Public Member Functions inherited from exotica::TaskMap | |
| virtual void | InstantiateBase (const Initializer &init) |
| virtual void | Update (Eigen::VectorXdRefConst x, Eigen::VectorXdRefConst u, Eigen::VectorXdRef phi) |
| virtual void | Update (Eigen::VectorXdRefConst x, Eigen::VectorXdRefConst u, Eigen::VectorXdRef phi, Eigen::MatrixXdRef dphi_dx, Eigen::MatrixXdRef dphi_du) |
| virtual void | Update (Eigen::VectorXdRefConst x, Eigen::VectorXdRefConst u, Eigen::VectorXdRef phi, Eigen::MatrixXdRef dphi_dx, Eigen::MatrixXdRef dphi_du, HessianRef ddphi_ddx, HessianRef ddphi_ddu, HessianRef ddphi_dxdu) |
| virtual int | TaskSpaceJacobianDim () |
| virtual void | PreUpdate () |
| virtual std::vector< TaskVectorEntry > | GetLieGroupIndices () |
| std::vector< KinematicFrameRequest > | GetFrames () const |
| Public Member Functions inherited from exotica::Object | |
| Object () | |
| virtual | ~Object () |
| virtual std::string | type () const |
| Type Information wrapper: must be virtual so that it is polymorphic... More... | |
| std::string | GetObjectName () |
| void | InstantiateObject (const Initializer &init) |
| virtual std::string | Print (const std::string &prepend) const |
| Public Member Functions inherited from exotica::InstantiableBase | |
| InstantiableBase ()=default | |
| virtual | ~InstantiableBase ()=default |
| virtual std::vector< Initializer > | GetAllTemplates () const =0 |
| Public Member Functions inherited from exotica::Instantiable< JointPoseInitializer > | |
| void | InstantiateInternal (const Initializer &init) override |
| Initializer | GetInitializerTemplate () override |
| std::vector< Initializer > | GetAllTemplates () const override |
| virtual void | Instantiate (const JointPoseInitializer &init) |
| const JointPoseInitializer & | GetParameters () const |
Private Member Functions | |
| void | Initialize () |
| ! Joint reference value More... | |
Private Attributes | |
| int | num_controlled_joints_ |
| std::vector< int > | joint_map_ |
| ! Number of controlled joints More... | |
| Eigen::VectorXd | joint_ref_ |
| ! Subset selection matrix More... | |
Additional Inherited Members | |
| Public Attributes inherited from exotica::TaskMap | |
| std::vector< KinematicSolution > | kinematics = std::vector<KinematicSolution>(1) |
| int | id = -1 |
| int | start = -1 |
| int | length = -1 |
| int | start_jacobian = -1 |
| int | length_jacobian = -1 |
| bool | is_used = false |
| Public Attributes inherited from exotica::Object | |
| std::string | ns_ |
| std::string | object_name_ |
| bool | debug_ |
| Protected Attributes inherited from exotica::TaskMap | |
| std::vector< KinematicFrameRequest > | frames_ |
| ScenePtr | scene_ = nullptr |
| Protected Attributes inherited from exotica::Instantiable< JointPoseInitializer > | |
| JointPoseInitializer | parameters_ |
Member Function Documentation
◆ AssignScene()
|
overridevirtual |
Reimplemented from exotica::TaskMap.
◆ get_joint_map()
| const std::vector<int>& exotica::JointPose::get_joint_map | ( | ) | const |
◆ get_joint_ref()
| const Eigen::VectorXd& exotica::JointPose::get_joint_ref | ( | ) | const |
◆ Initialize()
|
private |
! Joint reference value
◆ set_joint_ref()
| void exotica::JointPose::set_joint_ref | ( | Eigen::VectorXdRefConst | ref | ) |
◆ TaskSpaceDim()
|
overridevirtual |
Implements exotica::TaskMap.
◆ Update() [1/3]
|
overridevirtual |
Implements exotica::TaskMap.
◆ Update() [2/3]
|
overridevirtual |
Reimplemented from exotica::TaskMap.
◆ Update() [3/3]
|
overridevirtual |
Reimplemented from exotica::TaskMap.
Member Data Documentation
◆ joint_map_
|
private |
! Number of controlled joints
◆ joint_ref_
|
private |
! Subset selection matrix
◆ num_controlled_joints_
|
private |
The documentation for this class was generated from the following file:
- /tmp/exotica/exotations/exotica_core_task_maps/include/exotica_core_task_maps/joint_pose.h
