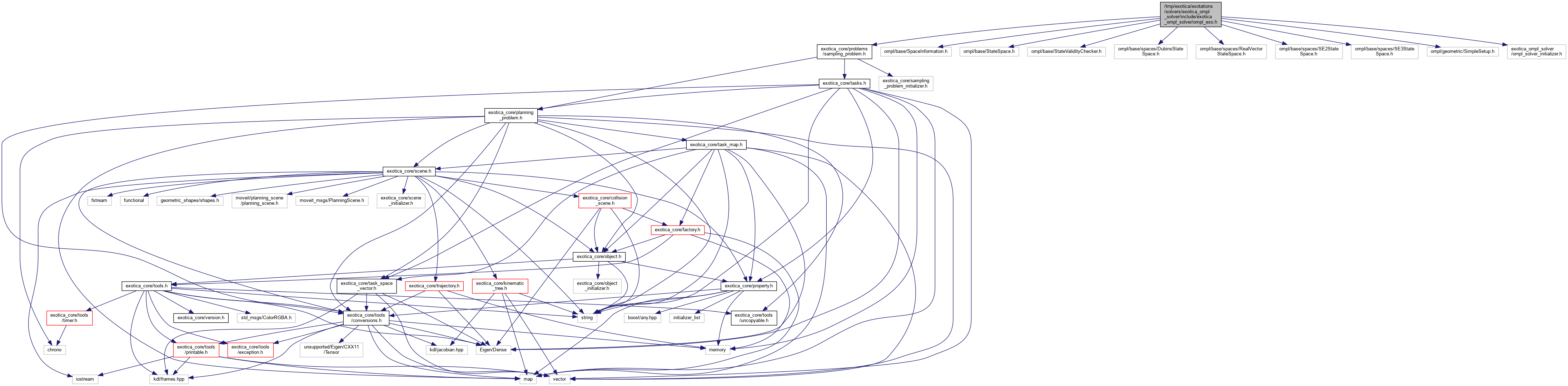
#include <exotica_core/problems/sampling_problem.h>#include <ompl/base/SpaceInformation.h>#include <ompl/base/StateSpace.h>#include <ompl/base/StateValidityChecker.h>#include <ompl/base/spaces/DubinsStateSpace.h>#include <ompl/base/spaces/RealVectorStateSpace.h>#include <ompl/base/spaces/SE2StateSpace.h>#include <ompl/base/spaces/SE3StateSpace.h>#include <ompl/geometric/SimpleSetup.h>#include <exotica_ompl_solver/ompl_solver_initializer.h>
Include dependency graph for ompl_exo.h:
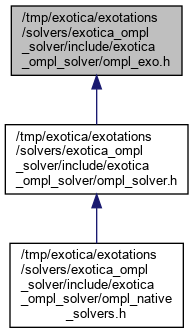
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| exotica | |
Typedefs | |
| typedef ompl::base::EuclideanProjection & | OMPLProjection |
Typedef Documentation
◆ OMPLProjection
| typedef ompl::base::EuclideanProjection& OMPLProjection |
