|
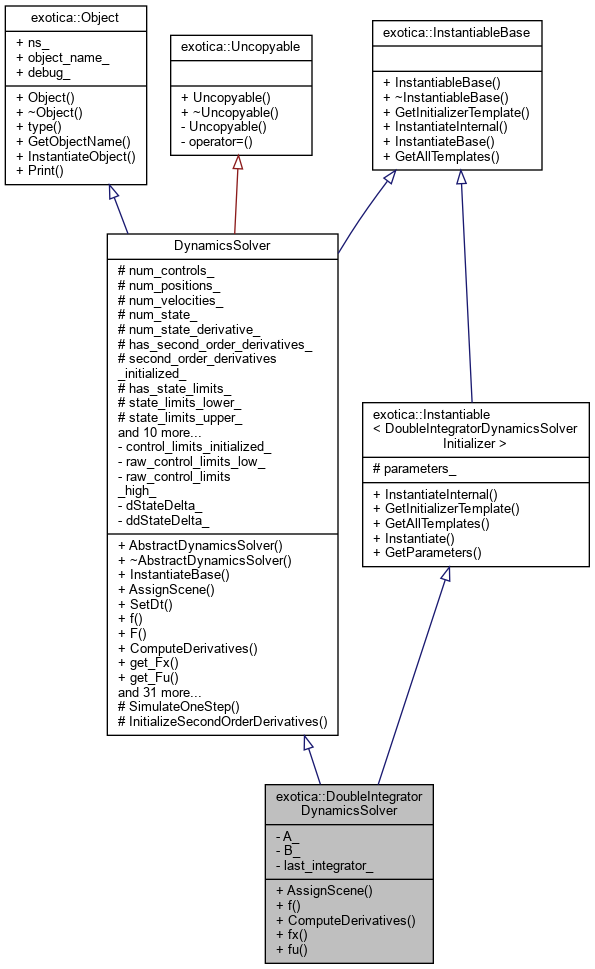
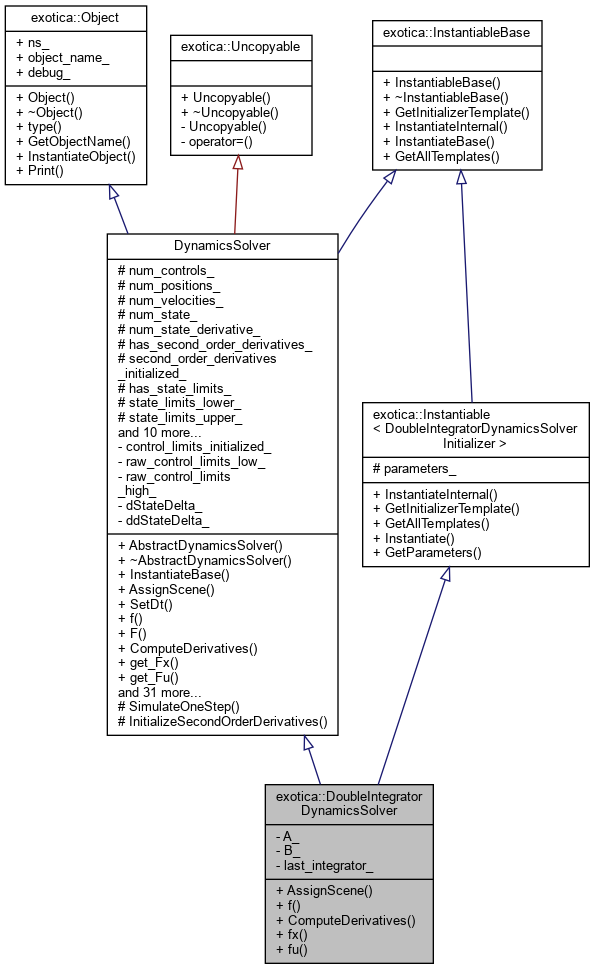
| void | AssignScene (ScenePtr scene_in) override |
| |
| StateVector | f (const StateVector &x, const ControlVector &u) override |
| | Forward dynamics. This computes the differential dynamics. More...
|
| |
| void | ComputeDerivatives (const StateVector &x, const ControlVector &u) override |
| | Computes derivatives fx, fu, Fx, Fu [single call for efficiency, derivatives can be retrieved with get_fx, get_fu, get_Fx, get_Fu]. More...
|
| |
| StateDerivative | fx (const StateVector &x, const ControlVector &u) override |
| | Derivative of the forward dynamics w.r.t. the state. More...
|
| |
| ControlDerivative | fu (const StateVector &x, const ControlVector &u) override |
| | Derivative of the forward dynamics w.r.t. the control. More...
|
| |
| | AbstractDynamicsSolver () |
| |
| virtual | ~AbstractDynamicsSolver () |
| |
| virtual void | InstantiateBase (const Initializer &init) |
| | Instantiates the base properties of the DynamicsSolver. More...
|
| |
| virtual void | AssignScene (std::shared_ptr< Scene > scene_in) |
| | Passes the Scene of the PlanningProblem to the DynamicsSolver. More...
|
| |
| virtual void | SetDt (double dt_in) |
| | Sets the timestep dt to be used for integration. More...
|
| |
| virtual StateVector | F (const StateVector &x, const ControlVector &u) |
| | State transition function. This internally computes the differential dynamics and applies the chosen integration scheme. More...
|
| |
| const StateDerivative & | get_Fx () const |
| | Returns derivative Fx computed by ComputeDerivatives. More...
|
| |
| const ControlDerivative & | get_Fu () const |
| | Returns derivative Fu computed by ComputeDerivatives. More...
|
| |
| const StateDerivative & | get_fx () const |
| | Returns derivative fx computed by ComputeDerivatives. More...
|
| |
| const ControlDerivative & | get_fu () const |
| | Returns derivative fu computed by ComputeDerivatives. More...
|
| |
| StateDerivative | fx_fd (const StateVector &x, const ControlVector &u) |
| | Derivative of the forward dynamics w.r.t. the state [finite differencing]. More...
|
| |
| ControlDerivative | fu_fd (const StateVector &x, const ControlVector &u) |
| | Derivative of the forward dynamics w.r.t. the control [finite differencing]. More...
|
| |
| const bool & | get_has_second_order_derivatives () const |
| | Returns whether second-order derivatives are available. More...
|
| |
| virtual Eigen::Tensor< T, 3 > | fxx (const StateVector &x, const ControlVector &u) |
| |
| virtual Eigen::Tensor< T, 3 > | fuu (const StateVector &x, const ControlVector &u) |
| |
| virtual Eigen::Tensor< T, 3 > | fxu (const StateVector &x, const ControlVector &u) |
| |
| StateVector | Simulate (const StateVector &x, const ControlVector &u, T t) |
| | Simulates the dynamic system from starting state x using control u for t seconds. More...
|
| |
| virtual StateVector | StateDelta (const StateVector &x_1, const StateVector &x_2) |
| | Return the difference of two state vectors. Used when e.g. angle differences need to be wrapped from [-pi; pi] Returns x_1-x_2. More...
|
| |
| void | StateDelta (const StateVector &x_1, const StateVector &x_2, Eigen::VectorXdRef xout) |
| |
| virtual Eigen::Matrix< T, Eigen::Dynamic, Eigen::Dynamic > | dStateDelta (const StateVector &x_1, const StateVector &x_2, const ArgumentPosition first_or_second) |
| | Return the difference of the StateDelta operation between two state vectors. The ArgumentPosition argument can be used to select whether to take derivative w.r.t. x_1 or x_2. More...
|
| |
| virtual Hessian | ddStateDelta (const StateVector &x_1, const StateVector &x_2, const ArgumentPosition first_or_second) |
| |
| virtual Eigen::Matrix< T, Eigen::Dynamic, 1 > | GetPosition (Eigen::VectorXdRefConst x_in) |
| | Returns the position-part of the state vector to update the scene. For types including SE(3) and rotation, convert to the appropriate representation here by overriding this method. More...
|
| |
| int | get_num_controls () const |
| | Returns number of controls. More...
|
| |
| int | get_num_positions () const |
| | Returns number of positions. More...
|
| |
| int | get_num_velocities () const |
| | Returns number of velocities. More...
|
| |
| int | get_num_state () const |
| | Returns size of state space (nx) More...
|
| |
| int | get_num_state_derivative () const |
| | Returns size of derivative vector of state space (ndx) More...
|
| |
| T | get_dt () const |
| | Returns integration timestep dt. More...
|
| |
| Integrator | get_integrator () const |
| | Returns used integration scheme. More...
|
| |
| void | set_integrator (Integrator integrator_in) |
| | Sets integrator type. More...
|
| |
| void | SetIntegrator (const std::string &integrator_in) |
| | Sets integrator type based on request string. More...
|
| |
| const Eigen::MatrixXd & | get_control_limits () |
| | Returns the control limits vector. More...
|
| |
| void | set_control_limits (Eigen::VectorXdRefConst control_limits_low, Eigen::VectorXdRefConst control_limits_high) |
| | Sets the control limits. More...
|
| |
| const bool & | get_has_state_limits () const |
| | Returns whether state limits are available. More...
|
| |
| void | ClampToStateLimits (Eigen::Ref< Eigen::VectorXd > state_in) |
| | Clamps the passed in state to the state limits. More...
|
| |
| virtual ControlVector | InverseDynamics (const StateVector &state) |
| | Returns a control vector corresponding to the state vector assuming zero acceleration. More...
|
| |
| virtual void | Integrate (const StateVector &x, const StateVector &dx, const double dt, StateVector &xout) |
| | Integrates without performing dynamics. More...
|
| |
| | Object () |
| |
| virtual | ~Object () |
| |
| virtual std::string | type () const |
| | Type Information wrapper: must be virtual so that it is polymorphic... More...
|
| |
| std::string | GetObjectName () |
| |
| void | InstantiateObject (const Initializer &init) |
| |
| virtual std::string | Print (const std::string &prepend) const |
| |
| | InstantiableBase ()=default |
| |
| virtual | ~InstantiableBase ()=default |
| |
| virtual std::vector< Initializer > | GetAllTemplates () const =0 |
| |
| void | InstantiateInternal (const Initializer &init) override |
| |
| Initializer | GetInitializerTemplate () override |
| |
| std::vector< Initializer > | GetAllTemplates () const override |
| |
| virtual void | Instantiate (const DoubleIntegratorDynamicsSolverInitializer &init) |
| |
| const DoubleIntegratorDynamicsSolverInitializer & | GetParameters () const |
| |
|
| typedef Eigen::Matrix< T, NX, 1 > | StateVector |
| | Convenience definition for a StateVector containing both position and velocity (dimension NX x 1) More...
|
| |
| typedef Eigen::Matrix< T, NU, 1 > | ControlVector |
| | Convenience definition for a ControlVector (dimension NU x 1) More...
|
| |
| typedef Eigen::Matrix< T, NX, NX > | StateDerivative |
| | Convenience definition for a StateDerivative. More...
|
| |
| typedef Eigen::Matrix< T, NX, NU > | ControlDerivative |
| | Convenience definition for a ControlDerivative. More...
|
| |
| std::string | ns_ |
| |
| std::string | object_name_ |
| |
| bool | debug_ |
| |
| virtual StateVector | SimulateOneStep (const StateVector &x, const ControlVector &u) |
| | Integrates the dynamic system from state x with controls u applied for one timestep dt using the selected integrator. More...
|
| |
| void | InitializeSecondOrderDerivatives () |
| |
| int | num_controls_ = -1 |
| | Number of controls in the dynamic system. More...
|
| |
| int | num_positions_ = -1 |
| | Number of positions in the dynamic system. More...
|
| |
| int | num_velocities_ = -1 |
| | Number of velocities in the dynamic system. More...
|
| |
| int | num_state_ = -1 |
| | Size of state space (num_positions + num_velocities) More...
|
| |
| int | num_state_derivative_ = -1 |
| | Size of the tangent vector to the state space (2 * num_velocities) More...
|
| |
| bool | has_second_order_derivatives_ = false |
| | Whether this solver provides second order derivatives. If false (default), assumed to be all zeros. More...
|
| |
| bool | second_order_derivatives_initialized_ = false |
| | Whether fxx, fxu and fuu have been initialized to 0. More...
|
| |
| bool | has_state_limits_ = false |
| | Whether the solver specifies state limits. More...
|
| |
| Eigen::VectorXd | state_limits_lower_ |
| | Lower state limits (configuration and velocity) More...
|
| |
| Eigen::VectorXd | state_limits_upper_ |
| | Upper state limits (configuration and velocity) More...
|
| |
| T | dt_ = 0.01 |
| | Internal timestep used for integration. Defaults to 10ms. More...
|
| |
| Integrator | integrator_ = Integrator::RK1 |
| | Chosen integrator. Defaults to Euler (RK1). More...
|
| |
| Eigen::MatrixXd | control_limits_ |
| | ControlLimits. Default is empty vector. More...
|
| |
| Eigen::Tensor< T, 3 > | fxx_default_ |
| |
| Eigen::Tensor< T, 3 > | fuu_default_ |
| |
| Eigen::Tensor< T, 3 > | fxu_default_ |
| |
| Eigen::MatrixXd | fx_ |
| | Internal storage of differential dynamics partial derivative fx computed by ComputeDerivatives. More...
|
| |
| Eigen::MatrixXd | fu_ |
| | Internal storage of differential dynamics partial derivative fu computed by ComputeDerivatives. More...
|
| |
| Eigen::MatrixXd | Fx_ |
| | Internal storage of state transition partial derivative Fx computed by ComputeDerivatives. More...
|
| |
| Eigen::MatrixXd | Fu_ |
| | Internal storage of state transition partial derivative Fu computed by ComputeDerivatives. More...
|
| |
| DoubleIntegratorDynamicsSolverInitializer | parameters_ |
| |
 Public Member Functions inherited from exotica::AbstractDynamicsSolver< T, NX, NU >
Public Member Functions inherited from exotica::AbstractDynamicsSolver< T, NX, NU >